BVR(Beyond Visual Range、視程外)モードはレーダーあるいはIRSTを使って遠距離の目標を探索し、攻撃を行うモードです。アメリカ機と異なり、レーダーに関する情報は主にHUDに表示されます。
ОБЗ
SCANモード
[2]キーを押すとBVRモードに切り換わり、最初はSCANモードになります。レーダーを作動させるには[I]キー、IRSTを作動させるには[O]キーを押します。レーダー作動中はHUDには“И”のシンボル、IRSTの場合は“Т”のシンボルが表示されます。SCANモードでは最大24目標を感知することが出来ます。
フライトモード
SCANモードのときは“ОБЗ ДВБ”、TWSモードのときは“СНП ДВБ”と表示されます。切り換えは[Alt]+[I]キーで行います。
レンジスケール
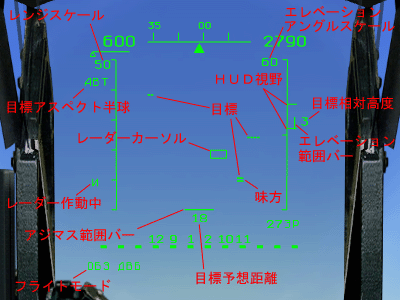
左の縦軸は距離のスケールで、下端が0、上端が数字で示されている最大距離(km)となります。最大距離は[-][=]で切り換えることが出来ます。この最大距離はHUD上の表示範囲を切り替えるだけであって、レーダーが目標を探知できる距離が変化するわけではありません。
エレベーションアングルスケール
右の縦軸はエレベーションアングル(仰角・俯角)のスケールで、中央の短いメモリの位置が0度(水平)、上端は60度です。
エレベーション範囲バー
レーダーが走査しているエレベーション(垂直方向)範囲を示しています。[Shift]+[;]、[Shift]+[.]で走査範囲を上下させることができます。
HUD視野マーク
HUD越しに見える視野の範囲を示しています。
アジマス範囲バー
レーダーが走査しているアジマス(水平方向)範囲を示しています。[Shift]+[,]、[Shift]+[/]で走査範囲を左右にずらすことができます。
目標予想距離・目標相対高度
AWACS等からの情報で目標との距離・高度差が判明した場合、まず[Ctrl]+[-]、[Ctrl]+[=]で予想距離(km)を設定し、次に[Shift]+[;]、[Shift]+[.]で相対高度(km)を設定します。これによってレーダーはその目標がいると思われる空域を走査することになります。
目標アスペクト半球
予想される目標の向きです。[Win]+[I]で切り換えることが出来ます。“ППС”は高PRF(パルス反復周波数)を用いるモードで、こちらに向かって接近してくる目標をより遠距離で探知するのに適しています。“ЗПС”は中PRFを用いるモードで、感知距離は高PRFより劣りますが目標がこちらに対して後ろを向けているとき(相対速度が低いとき)でも探知が可能です。“АВТ”は高PRF・中PRFを交互に使用します。
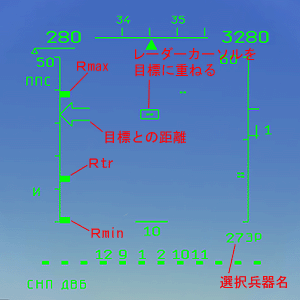
目標
レーダーが目標を感知するとHUDにはその水平方向と距離に応じた位置に短い点線を表示します。目標からのレーダー反射が強いほど点の数が多く(横に長く)なります。目標が味方だと判明した場合は上下2重の線になります。
レーダーカーソル
[;]、[.]、[,]、[/]で上下左右に動かすことができ、目標に重ねて[Tab]を押すと目標をロックできます。目標をロックするとSTTモードに切り換わります。
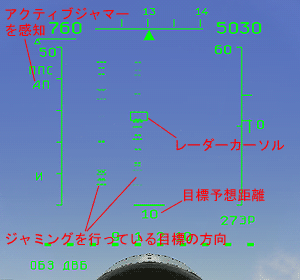
自機がECMによるジャミングを受けると、HUDにはジャミング波が発信されている方向にノイズの帯のように目標マークがランダム表示され続けます。セミアクティブレーダーホーミングミサイルをHOJ(Home On Jam)モードで発射する場合は、このノイズの帯にカーソルを合わせて[Tab]を押すと発信源がロックされます。発信源との距離はレーダーでは測定できないため、AWACSからの情報などを頼りにパイロットが自分で予想距離を設定する必要があります(デフォルトは10kmになっています)。“ПР”シンボル(発射許可)はこの予想距離と高度を基に計算して出されますが、[Alt]+[W]を押すと発射許可が無くてもミサイルを発射することが可能になります。発射されたミサイルは自機のレーダーによる誘導ではなく、このジャミング波に対してパッシブ誘導を行って発信源に向かって行きます。
СНП
TWSモード
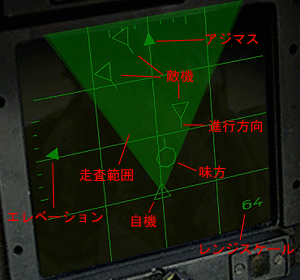
SCANモードからTWSモードに切り換えるには[Alt]+[I]キーを押します。SCANモードが単に最新走査で得られた目標の現在位置を示すだけなのに対し、TWSモードは最大10目標を追跡し続けてその移動方向も示すことができます。HeadDownDisplayには自機を上から見下ろす形で追跡中の目標の現在位置とその移動方向が示されます。